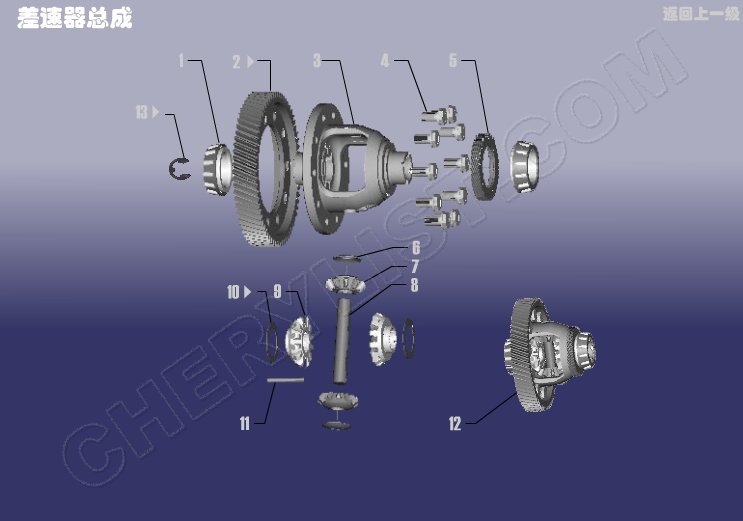
QR519 Transmission ASSY DIFFERENTIA ສໍາລັບ ChERY A3 M11
1 QR519MHA-1701703 FR-RR BEARING – DIFFERENTIA
2 CSQ-CDCL DRIVEN GEAR – DIFFERENTIA
3 QR519MHA-1701701 ທີ່ຢູ່ອາໄສ – ຄວາມແຕກຕ່າງ
5 QR519MHA-1701705 DRIVE GEAR – ODOMETER
6 QR519MHA-1701714 WASHER – BALL
7 QR523-1701711 ເກຍ – DIFF PLANETARY
8 QR523-1701712 SHAFT – DIFFERENTIA PINION
9 QR523-1701709 SD GEAR
10 ເຄື່ອງຊັກຜ້າ CSQ-BZCLTP – SD GEAR
11 QR519MHA-1701713 PIN – PLANETAY Gear SHAFT
12 QR519MHA-1701700 DIFFERENTIA ASSY
13 ເຄື່ອງຊັກຜ້າ CSQ-TZDP – RR DIFFERENTIA BEARING RING OTR
1, ລະບົບສາຍສົ່ງແມ່ນຕັ້ງຢູ່ທາງຫລັງຂອງເຄື່ອງຈັກ, ແລະທີ່ຢູ່ອາໄສຂອງມັນຖືກສ້ອມແຊມກັບເຄື່ອງຈັກໂດຍ screws.
2, ການທໍາງານຂອງສາຍສົ່ງ
1. ປ່ຽນອັດຕາສ່ວນລະບົບສາຍສົ່ງ (ກຳນົດຄວາມໄວຂອງລົດທີ່ແລ່ນໄປໜ້າດ້ວຍຄວາມໄວຂອງເຄື່ອງຈັກ)
2. ປ່ຽນທິດທາງຂອງແຮງ (ເກຍປີ້ນ)
3. ຮັບຮູ້ເຄື່ອງມືທີ່ເປັນກາງ (ແລ່ນຢູ່ບ່ອນຫວ່າງໆ).
3, ອີງຕາມການຈັດປະເພດລະບົບສາຍສົ່ງ, ລະບົບສາຍສົ່ງແມ່ນແບ່ງອອກເປັນລະບົບເກຍຄູ່ມືແລະລະບົບສາຍສົ່ງອັດຕະໂນມັດ, ແລະເກຍເກຍຂອງພວກເຂົາແມ່ນແຕກຕ່າງກັນ. ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບຂ້າງລຸ່ມນີ້, ພວກເຮົາທຸກຄົນຮູ້ວ່າລົດໃຫຍ່ໄດ້ຖືກແບ່ງອອກເປັນຂັບຫນ້າແລະຂັບຫລັງ. ເພື່ອປັບຕົວເຂົ້າກັບມັນ, ລະບົບສາຍສົ່ງຍັງແບ່ງອອກເປັນການສົ່ງຜ່ານທາງຂວາງແລະສາຍສົ່ງຕາມລວງຍາວ. ລະບົບສາຍສົ່ງທາງຂວາງແມ່ນກົງກັບໄດທາງຫນ້າແລະການສົ່ງຜ່ານທາງຍາວກົງກັບໄດຫລັງ. ເນື່ອງຈາກຄວາມສັບສົນຂອງລະບົບສາຍສົ່ງອັດຕະໂນມັດແມ່ນສູງກວ່າເລັກນ້ອຍ, ໃຫ້ພວກເຮົາຮຽນຮູ້ຄວາມຮູ້ຂອງລະບົບເກຍຄູ່ມືກ່ອນ, ດັ່ງນັ້ນໃນທີ່ນີ້ພວກເຮົາຈະອະທິບາຍລະບົບສາຍສົ່ງຄູ່ມືໃຫ້ທ່ານ.
4, ອົງປະກອບຂອງລະບົບສາຍສົ່ງຄູ່ມືແມ່ນປົກກະຕິແລ້ວປະກອບດ້ວຍ shaft ຂາເຂົ້າ, shaft ຜົນຜະລິດ, shaft ກາງ, ຄວາມແຕກຕ່າງແລະ reducer (ການປະກອບທີ່ແຕກຕ່າງກັນຂອງລະບົບສາຍສົ່ງ transverse ແມ່ນປະກອບກັບລະບົບສາຍສົ່ງ), ເກຍ, bearings, synchronizer, ກົນໄກການປ່ຽນ, ສ້ອມຂອງສ້ອມ, ປະທັບຕານ້ໍາມັນ, ນ້ໍາມັນຫລໍ່ລື່ນ, ແກະ, ຜົນຜະລິດ flange, ຄວາມເຂົ້າໃຈກ່ຽວກັບການປ່ຽນແປງຂອງເຄື່ອງຈັກ (ພວກເຮົາຮູ້ເຖິງການ synchronizing gear, ແລະອື່ນໆ). hub) ແລະແຂນປ່ຽນເກຍ (ສູນປ່ຽນເກຍ) ໂດຍຄູ່ມື. ໃນຄວາມເປັນຈິງ, ການປະຕິບັດຕົວຈິງຂອງການປ່ຽນແປງແມ່ນການເຊື່ອມຕໍ່ເກຍການປ່ຽນແປງທີ່ແຕກຕ່າງກັນແລະວົງແຫວນ synchronous ຜ່ານແຂນຮ່ວມ. ຫຼັງຈາກນັ້ນ, ພະລັງງານແມ່ນສົ່ງອອກໄປຫາ shaft ຜົນຜະລິດໂດຍຜ່ານ synchronizer ເພື່ອຮັບຮູ້ຜົນຜະລິດຂອງເກຍທີ່ແຕກຕ່າງກັນ. ໃນເວລາທີ່ການເຄື່ອນຍ້າຍ, ພວກເຮົາຍ້າຍຕົວຈັບການຄວບຄຸມ shift, ແລະຫຼັງຈາກນັ້ນດຶງຄວາມຍາວຂອງສ້ອມໃນສາຍສົ່ງເພື່ອເຮັດວຽກພາຍໃຕ້ການປະຕິບັດຂອງສາຍ shift ໄດ້. ສ້ອມປ່ຽນເຄື່ອນທີ່ແຂນຮ່ວມເທິງ synchronizer ເພື່ອຮັບຮູ້ການປ່ຽນແປງຂອງເກຍທີ່ແຕກຕ່າງກັນ.
5, ຫນ້າທີ່ຂອງອຸປະກອນ locking ຕົນເອງແລະ interlock ຂອງລະບົບສາຍສົ່ງຄູ່ມືແມ່ນເພື່ອປ້ອງກັນບໍ່ໃຫ້ຍານພາຫະນະຈາກການປ່ຽນອັດຕະໂນມັດຫຼືການເຄື່ອນຍ້າຍອອກຈາກເກຍໃນລະຫວ່າງການຂັບລົດ (ເຊັ່ນ: ໂດດໂດຍກົງຈາກເກຍ 2 ເປັນກາງ). ຫນ້າທີ່ຂອງ interlock ແມ່ນເພື່ອປ້ອງກັນການປ່ຽນເປັນສອງເກຍໃນເວລາດຽວກັນ (ຕົວຢ່າງເຊັ່ນ, ປ່ຽນເປັນເກຍ 1 ແລະເກຍ 3 ໃນເວລາດຽວກັນ). ເມື່ອລູກເຫຼັກຖືກດຶງຈາກຊ້າຍຂອງຮ່ອງ 2 ຫາ groove 1, ການປ່ຽນເກຍແມ່ນຮັບຮູ້; ເຊັ່ນດຽວກັນ, ໃນເວລາທີ່ເຂົາດຶງອອກ groove 3 ໄປທາງຂວາ, ການປ່ຽນແປງຂອງຕົນຍັງໄດ້ຮັບຮູ້. ໃນວິທີການນີ້, ພາຍໃຕ້ການປະຕິບັດຮ່ວມກັນຂອງພາກຮຽນ spring locking ຕົນເອງແລະບານເຫຼັກ locking ຕົນເອງກ່ຽວກັບແກະແລະ groove ສຸດ shaft fork shift (ຮ່ອງແມ່ນ stuck ກັບລູກເຫຼັກ), ການປ່ຽນເກຍອັດຕະໂນມັດແລະການ disengagement ເກຍອັດຕະໂນມັດໄດ້ຖືກປ້ອງກັນຢ່າງມີປະສິດທິຜົນ. ຮູບຂ້າງເທິງສະແດງໃຫ້ເຫັນອຸປະກອນ interlocking ຂອງລະບົບສາຍສົ່ງຄູ່ມື. ຈາກຮູບ, ພວກເຮົາສາມາດເຫັນໄດ້ວ່າມັນມີ shaft fork 3 shift, ກາງແມ່ນ pin interlocking ແລະບານເຫຼັກ interlocking, ແລະພາກສ່ວນທີ່ມີຮົ່ມແມ່ນວັດຖຸເຊື່ອມຕໍ່ fork ສ້ອມ, ໃນທີ່ບານເຫຼັກ interlocking ໄດ້ຕິດຕັ້ງ.
ຫຼັກການປະຕິບັດການຂອງມັນຄື: ເມື່ອສ້ອມປ່ຽນດ້ານເທິງເຂົ້າກັບເກຍ (ຕາມຮູບທີ່ສາມ), ບານເຫຼັກທີ່ຕິດກັນຈະຍ້າຍໄປທີ່ສ້ອມຂອງສ້ອມກາງ, ຖອດຈາກແກນສ້ອມດ້ານເທິງ, ແລະຍ້າຍເຂັມຂັດລົງ, ເພື່ອກີດຂວາງແກນສ້ອມປ່ຽນກາງ ແລະລຸ່ມ. ດັ່ງນັ້ນ, ບານເຫຼັກທີ່ຕິດກັນທາງລຸ່ມບໍ່ສາມາດຖືກແຍກອອກຈາກສ້ອມເລື່ອນຊັ້ນລຸ່ມໄດ້, ດັ່ງນັ້ນຈຶ່ງບໍ່ສາມາດໃສ່ເກຍໄດ້ອີກຕໍ່ໄປ, ແລະສຸດທ້າຍກໍ່ປ້ອງກັນບໍ່ໃຫ້ມັນເຂົ້າໄປໃນສອງເກຍໃນເວລາດຽວກັນ.