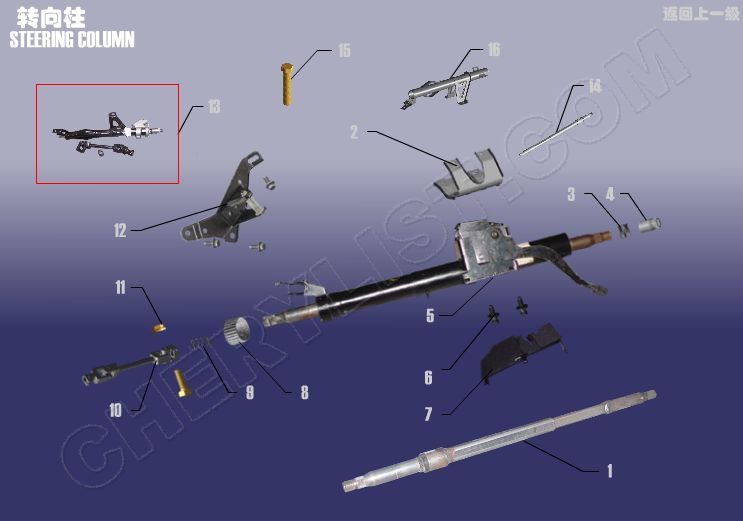
Շասսիի ղեկային համակարգ CHERY AMULET A15-ի ղեկային սյուն
1 A11-3404110BB ՂԵԿԱՎԱՐՄԱՆ ԱՌԱՍԻ ՀԱՎԱՔԱԾՈՒ
2 A11-3403101 ՂԵԿԱՎԱՐՄԱՆ ՍԿԱՎԱՌԱԿ
3 A11-3404037 ՃՆՇՄԱՆ ԶՊԱՐԱՆ
4 A11-3404035 Ատամնավոր թևք
5 A11-3404001BA ՂԵԿԱՎԱՐՄԱՆ ՍՅՈՒՆ ԳԼԽԱՎՈՐ ԼԵՌՆՈՎ
6 A11-3403103 Անվտանգության պտուտակ
7 A11-5305830 Ծածկոցի հավաքածու սյուն
8 A11-3404031 Ղեկային սյան ստորին կրող
9 A11-3404039 ՃՆՇՄԱՆ ԳԱՐՈՒՆ-ՂԵԿԱՎՈՐ ՊԻԼԱ
10 A11-3404050BB Հզոր կառավարման ունիվերսալ միացում
11 CQ32608 Վեցանկյուն գլխիկով ֆլանշային гайկա
12 A11-3403030 Ղեկային սյան ստորին հենարան
13 A11-3404010AB Սյունակ և ունիվերսալ միացման հավաքածու
14 A11-3404110 ԼԻՍԿԻ ՀԱՄԱԿԱՐԳ – ՂԵԿԱՎԱՐՈՒՄ
15 CQ1600825 ԲՈԼՏ – ՂԵԿԱՎԱՐՄԱՆ ՄԻՋՈՑԻ ԱՄՐԱԳՐՄԱՆ ՀԱՄԱԿԱՐԳ
16 A11-3404100 Սյունակի հավաքածու – ղեկ
1. Ֆունկցիան՝
Տրանսպորտային միջոցի երթևեկության ուղղությունը փոխելու կամ վերականգնելու հատուկ մեխանիզմ:
2. Կազմը.
ղեկի կառավարման մեխանիզմ
ղեկային մեխանիզմ
Ուղղորդող փոխանցման մեխանիզմ
3. Ղեկային համակարգի տերմինաբանություն
1. Ղեկի կենտրոնը և շրջադարձի շառավիղը
(1) Կառավարման կենտրոն. երբ տրանսպորտային միջոցը շրջադարձ է կատարում, բոլոր անիվի առանցքները պետք է հատվեն մեկ կետում, որը 0-ն կոչվում է կառավարման կենտրոն։
(2) Շրջադարձի շառավիղ. ղեկի կենտրոնից 0 մինչև արտաքին ղեկի և գետնի շփման կետը r հեռավորությունը կոչվում է տրանսպորտային միջոցի շրջադարձի շառավիղ։
2. Ուղղորդող տրապեցոիդ և առաջային տարածություն
Երկու ղեկային անիվների ներքին անկյունը պտտվելիս β և արտաքին անկյուն α տարբերությունը β-α Սա կոչվում է առաջային ցուցադրություն։ Առաջային տարածություն ապահովելու համար ղեկային մեխանիզմը նախագծվում է սեղանի տեսքով։
3. Ղեկային համակարգի անկյունային փոխանցման հարաբերակցություն 1 Ղեկային մեխանիզմի անկյունային փոխանցման հարաբերակցություն IW1:
Ղեկի անկյան աճի և ղեկի ճոճանակի անկյան համապատասխան աճի հարաբերակցությունը։ (2): Ղեկի փոխանցման հարաբերակցություն iw2:
Ղեկային ճոճանակի անկյան աճի և ղեկի գտնվելու կողմում գտնվող ղեկային հոդի անկյան համապատասխան աճի հարաբերակցությունը։
(3). Ղեկային համակարգի անկյունային փոխանցման հարաբերակցություն I: I = IW1 – IW2
Որքան մեծ է ղեկային համակարգի անկյունային փոխանցման հարաբերակցությունը, այնքան թեթև է ղեկը։ Սակայն, եթե փոխանցման հարաբերակցությունը չափազանց մեծ է, ղեկային կառավարումը բավականաչափ զգայուն չի լինի։
4. Ղեկի ազատ շարժում. ղեկի անկյունային շարժը պարապ վիճակում:
Չափազանց ազատ ընթացք. անզգայուն ղեկ։
Ազատ ճանապարհորդությունը չափազանց փոքր է. ճանապարհի հարվածը մեծ է, իսկ վարորդը՝ չափազանց նյարդային։